
This post is being written on behalf of Caleb Wagner, Ben Liang, and Jarod Romankiw.
The interactive robotic light painting (IRLP) team has been working on the final development of our artistic creation. This post focuses on the two main areas of our project, and how they’ve developed over the past week.
Robot
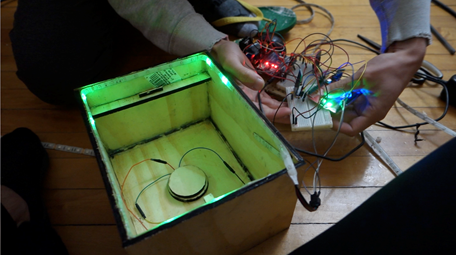
We’ve had a lot of trouble with the robot this week. Our original plan to have this controlled on an app via a Bluetooth module had to be brought back to the drawing board. The central cause to the issues we’ve had are centrally located about the cheap components bought for this project. For the first few weeks, this robot was working all right. The motors seemed to deliver an equal amount of power and further the bot was controllable. However, as more modules were added (ring light, mini leds, and led strips) the system because very crowded and heavy and the bot started functioning poorly. This can be mainly attributed to the lack of reliable components and the fact that the motors could not provide enough power. As the time continued on, the piece began to become too complicated to troubleshoot. So we had to unfortunately turn to a backup plan which was a remote controlled car. We should’ve originally focused our project around RC car, since it is definitely more reliable. The reason we went with the DIY robot was for the added customization (pre-determined paths, app-integration, etc.). Trying to salvage our project, we were forced to go with the next best thing. This is an image of us troubleshooting our robot shortly before calling the quits and purchasing a RC car.
Here is the robot casing with the glowing ring light and bottom:
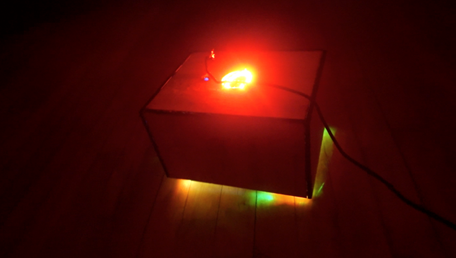
These are some last performances of our custom robot:



Human Interaction
Since our robot has been struggling, the joystick portion of the project has been removed in favor of the remote that was included with the RC car. So, the only portion of interaction outside of the driving is the control of the various LED lights. This is be done from a phone via a Bluetooth module attached to an LED strip and Arduino.

For the final iterations of product, we decided that one user would be driving the robot and another user would be controlling the lights. The two users would create some light painting corporately.